
highlights
- VBS4 true-earth simulator
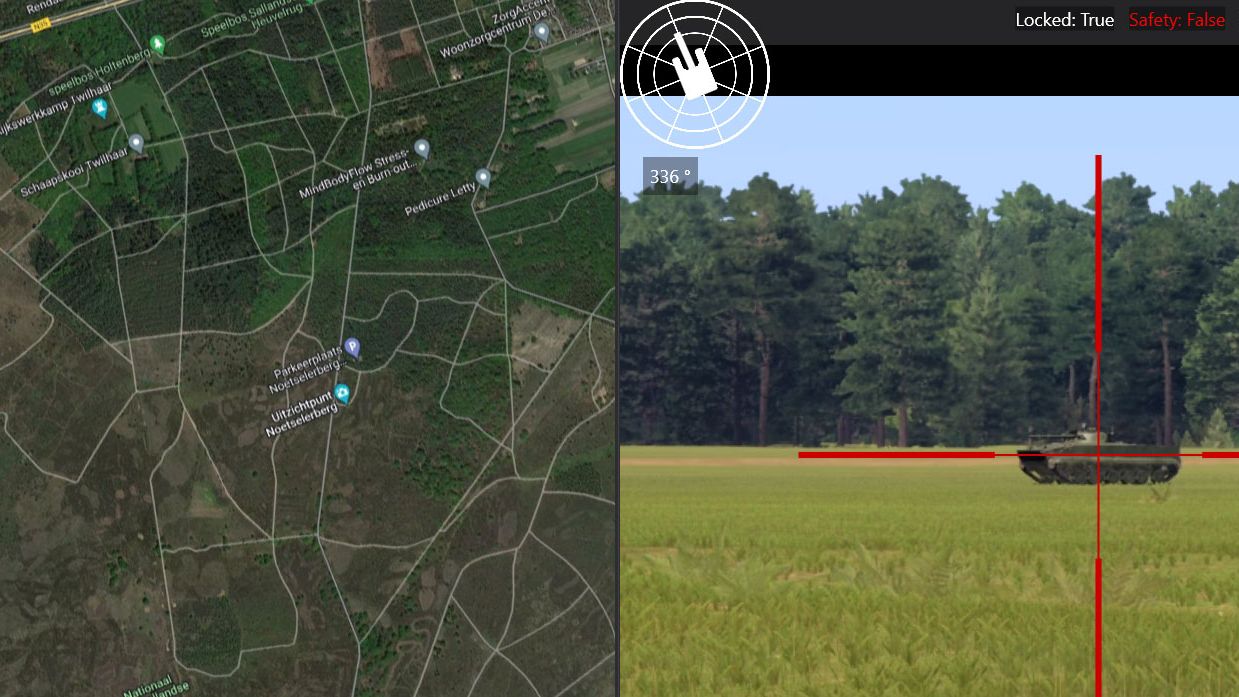
- integrated command & control interface
- ROS2 interface with external AI & autonomous navigation
- easy configuration of vehicles
best of both worlds.
Unmanned ground and aerial vehicles will have to operate in different configurations and under diverse conditions in the military arena. Simulation is indispensable for evaluating scenarios, gaining experience and training personnel efficiently and safely. This urgent need was addressed in the Outdoor Tactical Robotic Autonomous System Simulation Capacity (OTRASSC) project. We developed a hybrid simulator to combine the best of the physical and the virtual world for creating a realistic environment and experience.
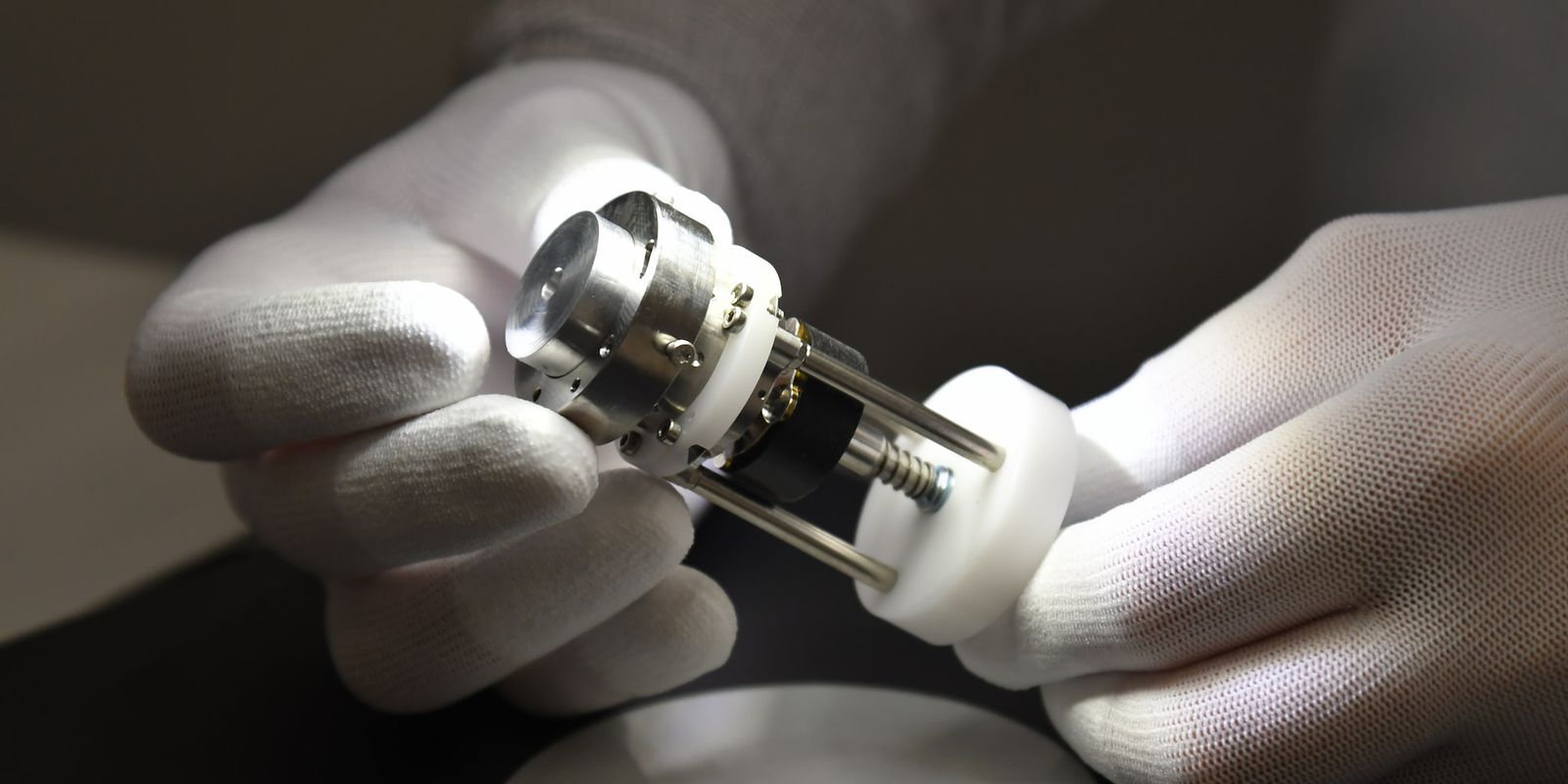
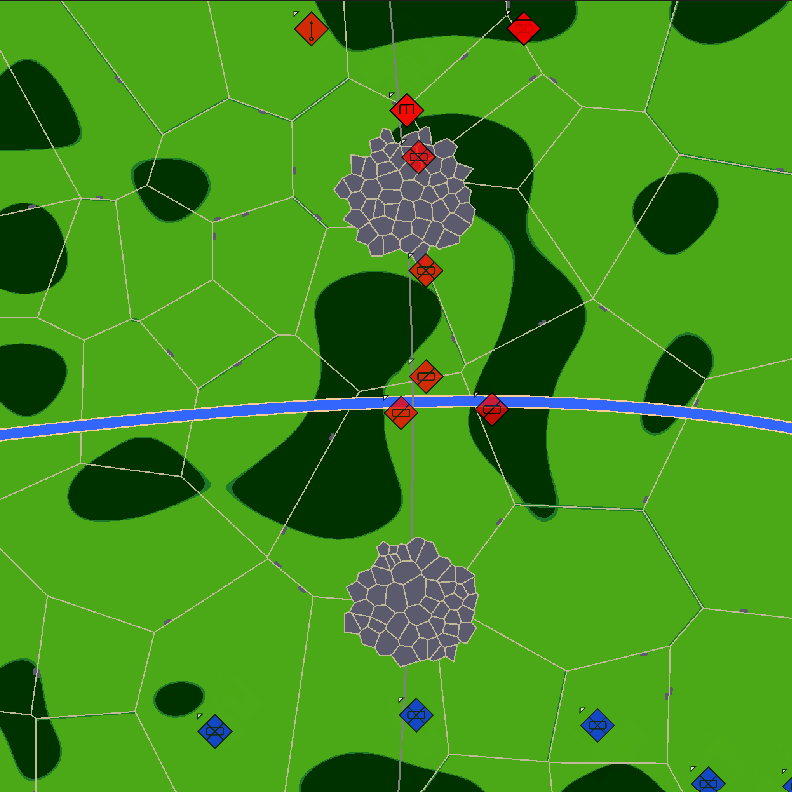
Our simulator comprises a server and various physical components. On the simulation server, tactical scenarios can be played out in real time in a kind of digital twin of the military training area. The physical components include outdoor remote controllers and GPS trackers. The remote controllers are used for running the simulated unmanned systems and reading out data from sensors and cameras. The GPS trackers, attached to opposing forces moving around the physical training area, provide the data to display them in the virtual training area.
unique solution.
We based our solution on the popular Virtual Battlespace (VBS) 4 simulator, provided with representations of a large number of military vehicles. Our simulator provides the simultaneous remote control of up to eight unmanned vehicles, in a virtual arena with hundreds of foes and computer-controlled friends. The modular, parametric design of the simulated vehicles facilitates the configuration of sensors, cameras, effectors, etc. In the integrated command & control interface, the location and sensor data of the unmanned vehicles can be displayed. The simulator has a ROS2 interface for connecting external AI & autonomous functionality, which allows replacing the physical controller, such as a joystick, by autonomous algorithms. This addition of hybrid simulation and ‘intelligent’ interface distinguishes our solution from a standard VBS simulator.

we realized a functional application within four months.
We drew on our in-depth knowledge of robotics and unmanned systems, our broad simulation expertise and our experience with hardware-in-the-loop testing for developing the hybrid simulator. I’m proud that we could realize a functional application within four months that received positive feedback during initial testing. It will help defence organizations to learn how to deploy the autonomous systems of the future, with yet to be developed capabilities integrated in the simulator. We want to connect even more autonomous functionality to the simulator and expand the possibilities for combining a physical platform with the simulation of a complex system mounted on it. Ultimately, we want our efforts to contribute to a safer world.
.jpg)
.jpg)